پژوهشگران سوییسی دست رباتیک جدیدی ساختهاند که با طراحی متقارن و قابلیت جداسازی از بازو و تحرک مستقل، میتواند وظایفی را انجام دهد که حتی از تواناییهای دست انسان نیز فراتر میروند.
دست انسان برای دههها معیار اصلی سنجش مهارت حرکتی به حساب میآمد و بیشتر دستهای رباتیکی با هدف تقلید از ساختار و عملکرد آن ساخته میشدند. اگرچه این رویکرد امکان انجام اعمال پایهای مانند گرفتن، نگه داشتن و بلند کردن اشیا را فراهم کرد، اما به طور ناخواسته محدودیتهای ذاتی دست انسان را نیز به سامانههای رباتیکی منتقل کرد.
پژوهشگران EPFL با کنار گذاشتن این الگوی تقلیدی، تلاش کردهاند به پرسشی بنیادین پاسخ دهند: اگر دست رباتیکی مجبور نباشد شبیه دست انسان باشد، چه قابلیتهای تازهای میتواند به دست آورد؟
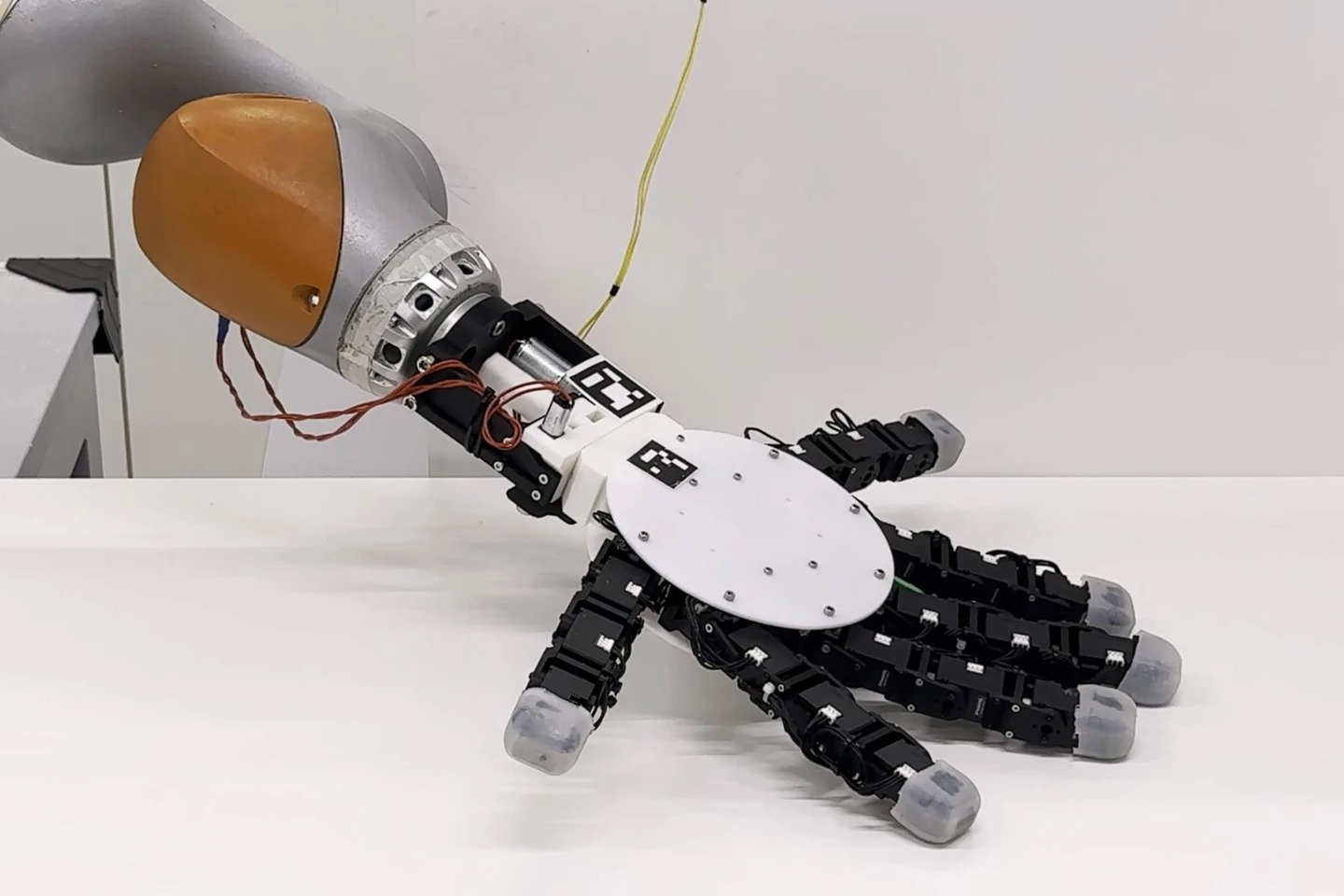
میتوانند به صورت مستقل کنترل شوند. این دست رباتیکی قادر است ۳۳ الگوی مختلف از حرکات گرفتن انسانی را بازتولید کند، اما تواناییهای آن به همینجا محدود نمیشود. طراحی متقارن دستگاه به هر ترکیبی از انگشتها اجازه میدهد نقش شست را ایفا کند و در نتیجه، محدودیت وجود تنها یک شست مخالف از میان برداشته میشود.
یکی از ویژگیهای شاخص این سامانه، امکان ایجاد شست مخالف در هر دو انتهای دست است. دو انگشت بیرونی میتوانند جابهجا شوند و در دو سمت مختلف، ساختار شست را شکل دهند. این قابلیت، همراه با حذف تمایز ثابت میان «کف دست» و «پشت دست» باعث میشود انگشتها بتوانند به سمت عقب خم شوند و عملاً جهت دست را معکوس کنند. چنین انعطافی، دامنهای از حرکات و دستکاریها را ممکن میسازد که در دست انسان وجود ندارد.
اود بیلارد، رئیس آزمایشگاه الگوریتمها و سامانههای یادگیری در مدرسه مهندسی EPFL گفت: «ما زمانی محدودیتهای دست انسان را به وضوح میبینیم که بخواهیم به اشیای زیر مبلمان یا پشت قفسهها دسترسی پیدا کنیم یا چند کار را همزمان انجام دهیم. هدف ما این بود که این مرزها را جابهجا کنیم.»
یکی از نوآورانهترین قابلیتهای این دست رباتیکی، امکان جدا شدن کامل آن از بازوی ربات است. هر انگشت میتواند به صورت خودمختار عمل کند و به دستگاه اجازه دهد با نوعی خزیدن، فراتر از محدوده دسترسی بازو حرکت کند. پژوهشگران این ترکیب از تحرک و دستکاری را «دستکاری حرکتی» توصیف میکنند؛ مفهومی که شامل انجام عملیات دقیق در حالت ثابت و همزمان، جابهجایی مستقل در محیط است.
بیلارد تأکید کرد که این ویژگی، پتانسیل بالایی برای کاربردهای صنعتی، خدماتی و اکتشافی دارد. در محیطهای صنعتی، جایی که مونتاژ چندمرحلهای و ظریف اهمیت دارد، دستی که بتواند همزمان چند ابزار را نگه دارد و جابهجا شود، میتواند بهرهوری را افزایش دهد. در رباتیک خدماتی، چنین سامانهای قادر است در فضاهای محدود حرکت کند و اشیا را از نقاطی بازیابی کند که برای بازوهای ثابت دسترسپذیر نیستند.
الهام اصلی این طراحی، برخلاف ظاهر علمی-تخیلی آن، از طبیعت گرفته شده است. پژوهشگران به جاندارانی مانند هشتپا اشاره میکنند که از اندامهای انعطافپذیر خود هم برای حرکت و هم برای گرفتن و دستکاری استفاده میکند. این الگوهای زیستی نشان دادهاند که ترکیب تحرک و مهارت در یک اندام واحد، میتواند کارایی را به شدت افزایش دهد.
 دست رباتیک
دست رباتیک کاربردهای بالقوه این دست رباتیکی تنها به صنعت محدود نمیشود. در حوزه پزشکی، بازوهای رباتیکی جراحی هماکنون دقت بالایی دارند، اما افزودن چنین دستی میتواند یک لایه عملکردی تازه ایجاد کند. توانایی گرفتن، نگه داشتن و استفاده همزمان از چند ابزار، میتواند سرعت عمل جراح و دقت انجام جراحیهای پیچیده را افزایش دهد. در حوزههای نظامی و دفاعی نیز از خنثیسازی مواد منفجره تا بازیابی اشیا از محیطهای خطرناک، چنین سامانهای میتواند نقش کلیدی ایفا کند.
پژوهشگران تأکید میکنند که این دست در حال حاضر به عنوان پروتز انسانی طراحی نشده است، اما از نظر فنی امکان سازگار کردن آن برای این منظور وجود دارد. بیلارد بیان کرد که قابلیت متقارن و برگشتپذیر این سامانه بهویژه در سناریوهایی ارزشمند است که کاربران به تواناییهایی فراتر از عملکرد طبیعی انسان نیاز دارند.
در مجموع، دست رباتیکی EPFL نشان میدهد که آینده رباتیک الزاماً در تقلید کامل از انسان خلاصه نمیشود. گاهی عبور از الگوهای زیستی آشنا و بازتعریف آنها میتواند راه را برای نسل تازهای از سامانههای هوشمند و فوقچابک هموار کند؛ سامانههایی که نهتنها جایگزین ابزارهای موجود میشوند، بلکه مرزهای آنچه «ممکن» تلقی میشود را نیز جابهجا میکنند.